applying ai to moko (smartcar robot)¶
Moko is an AI smart robotic car.
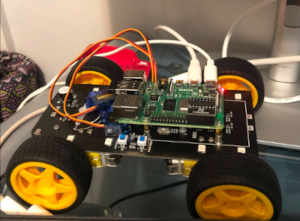
I built the Moko with a Rasperry Pi 4gb. It did take a bit of time tinkering with the hardware - that was fun! Though, be sure you have tiny itsy bitsy screws around. Playing with hardware really test your patience for sure. It took me about 3 hours to put the parts together, and I actually find it really zen! :)
So here is the snapshot I took at the very beginning of the excitement for putting this robot together piece by piece.
- Tech stack/hardware
- Python
- OpenCV
- Rasperry Pi
- Numpy
- PIL
development and testing¶
Here are some simple and somewhat uninteresting test scripts that I generated as part of testing all the components of Moko! I wanted to be sure all the parts are properly working, lit up, capturing images with the camera and sensor that came with it, etc...
import time
from Led import *
led = Led()
def test_Led():
try:
led.ledIndex(0x01, 255, 0, 0) # Red
led.ledIndex(0x02, 255, 125, 0) # orange
led.ledIndex(0x04, 255, 255, 0) # yellow
led.ledIndex(0x08, 0, 255, 0) # green
led.ledIndex(0x10, 0, 255, 255) # cyan-blue
led.ledIndex(0x20, 0, 0, 255) # blue
led.ledIndex(0x40, 128, 0, 128) # purple
led.ledIndex(0x80, 255, 255, 255) # white'''
print("The LED has been lit, the color is red orange yellow green cyan-blue blue white")
time.sleep(3) # wait 3s
led.colorWipe(led.strip, Color(0, 0, 0)) # turn off the light
print("\nEnd of program")
except KeyboardInterrupt:
led.colorWipe(led.strip, Color(0, 0, 0)) # turn off the light
print("\nEnd of program")
from Motor import *
PWM = Motor()
def test_Motor():
try:
PWM.setMotorModel(1000, 1000, 1000, 1000) # Forward
print("The car is moving forward")
time.sleep(1)
PWM.setMotorModel(-1000, -1000, -1000, -1000) # Back
print("The car is going backwards")
time.sleep(1)
PWM.setMotorModel(-1500, -1500, 2000, 2000) # Left
print("The car is turning left")
time.sleep(1)
PWM.setMotorModel(2000, 2000, -1500, -1500) # Right
print("The car is turning right")
time.sleep(1)
PWM.setMotorModel(0, 0, 0, 0) # Stop
print("\nEnd of program")
except KeyboardInterrupt:
PWM.setMotorModel(0, 0, 0, 0)
print("\nEnd of program")
from Ultrasonic import *
ultrasonic = Ultrasonic()
def test_Ultrasonic():
try:
while True:
data = ultrasonic.get_distance() # Get the value
print("Obstacle distance is " + str(data) + "CM")
time.sleep(1)
except KeyboardInterrupt:
print("\nEnd of program")
from Line_Tracking import *
line = Line_Tracking()
def test_Infrared():
try:
while True:
if GPIO.input(line.IR01) != True and GPIO.input(line.IR02) == True and GPIO.input(line.IR03) != True:
print('Middle')
elif GPIO.input(line.IR01) != True and GPIO.input(line.IR02) != True and GPIO.input(line.IR03) == True:
print('Right')
elif GPIO.input(line.IR01) == True and GPIO.input(line.IR02) != True and GPIO.input(line.IR03) != True:
print('Left')
except KeyboardInterrupt:
print("\nEnd of program")
from servo import *
pwm = Servo()
def test_Servo():
try:
while True:
for i in range(50, 110, 1):
pwm.setServoPwm('0', i)
time.sleep(0.01)
for i in range(110, 50, -1):
pwm.setServoPwm('0', i)
time.sleep(0.01)
for i in range(80, 150, 1):
pwm.setServoPwm('1', i)
time.sleep(0.01)
for i in range(150, 80, -1):
pwm.setServoPwm('1', i)
time.sleep(0.01)
except KeyboardInterrupt:
pwm.setServoPwm('0', 90)
pwm.setServoPwm('1', 90)
print("\nEnd of program")
from ADC import *
adc = Adc()
def test_Adc():
try:
while True:
Left_IDR = adc.recvADC(0)
print("The photoresistor voltage on the left is " + str(Left_IDR) + "V")
Right_IDR = adc.recvADC(1)
print("The photoresistor voltage on the right is " +
str(Right_IDR) + "V")
Power = adc.recvADC(2)
print("The battery voltage is " + str(Power * 3) + "V")
time.sleep(1)
print('\n')
except KeyboardInterrupt:
print("\nEnd of program")
from Buzzer import *
buzzer = Buzzer()
def test_Buzzer():
try:
buzzer.run('1')
time.sleep(1)
print("1S")
time.sleep(1)
print("2S")
time.sleep(1)
print("3S")
buzzer.run('0')
print("\nEnd of program")
except KeyboardInterrupt:
buzzer.run('0')
print("\nEnd of program")
# Main program logic follows:
if __name__ == '__main__':
print('Program is starting ... ')
import sys
if len(sys.argv) < 2:
print("Parameter error: Please assign the device")
exit()
if sys.argv[1] == 'Led':
test_Led()
elif sys.argv[1] == 'Motor':
test_Motor()
elif sys.argv[1] == 'Ultrasonic':
test_Ultrasonic()
elif sys.argv[1] == 'Infrared':
test_Infrared()
elif sys.argv[1] == 'Servo':
test_Servo()
elif sys.argv[1] == 'ADC':
test_Adc()
elif sys.argv[1] == 'Buzzer':
test_Buzzer()
image generation and processing¶
opencv is a great open source Python module for scraping images for AI/ML inputs.